Competition
The competition required us to complete a series of tasks with a multifunctional autonomous robot:
- following a black strip of electrical tape
- detecting and collecting objects the size of a soda can
- crossing 6” gaps
- detecting a fluctuating infrared signal
- detecting edges to avoid falling off the competition surface
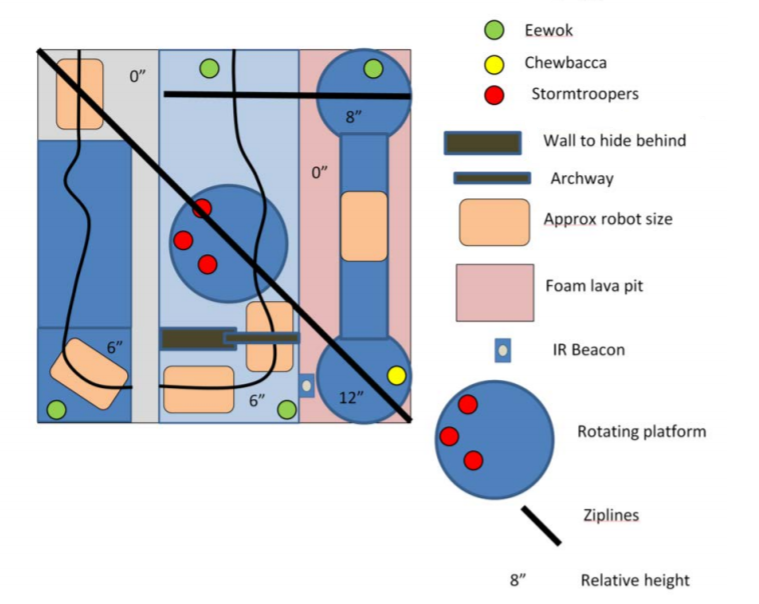
Originally, our plan was to follow the tape until its end using an aluminum bridge to cross the gap and an IR sensor to determine when we could pass through the gate. A double-jointed claw would pick up Ewoks as we sensed them and place them into a basket. Leaving the tape, we would drop another bridge to cross the second gap, pick up the last Ewok, and cross the suspension bridge by following the edge. After picking up Chewbacca, we would use a scissor lift to hook the basket onto the zipline and send them all home.
As the competition approached, we amended our strategy to favour reliability and consistency; instead of crossing the second gap, we would drive back after picking up the first three Ewoks.
By competition day, the major functionalities of the robot were in order and the robot could perform all its intended tasks. The largest point of uncertainty was in setting the parameters that calibrated the robot. For this we would have required more time and testing on the track.